1、镜像功能G24,G25
格式: G24 X__Y__Z__
M98 P_
G25 X__Y__Z__
G24建立镜像,由指令坐标轴后的坐标值指定镜像位置(对称轴、线、点),
G25指令用于取消镜像。
G24、G25为模态指令,可相互注销,G25为缺省值。
注: 有刀补时,先镜像 ,然后进行刀具长度补偿、半径补偿。
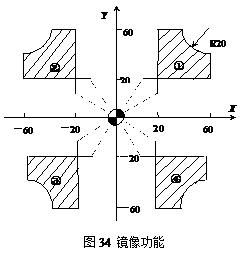
例. 图34所示的镜像功能程序
%1 主程序
N01 G92 X0 Y0 Z10
N02 G90 G17 M03
N03 M98 P100 加工①
N04 G24 X0 以Y轴镜像
N05 M98 P100 加工②
N06 G25 X0 取消Y轴镜像
N07 G24 X0 Y0 以位置点为(0,0)镜像
N08 M98 P100 加工③
N09 G25 X0 Y0 取消点(0,0)镜像
N10 G24 Y0 以X轴镜像
N11 M98 P100 加工④
N12 G25 Y0 取消X轴镜像
N13 M05
N14 M30
|
%100 子程序
N01 G01 Z-5 F50
N02 G00 G41 X20 Y10 D01
N03 G01 Y60
N04 X40
N05 G03 X60 Y40 R20
N06 Y20
N07 X10
N08 G00 X0 Y0
N09 Z10
N10 M99 |
2、缩放功能G50,G51
格式: G51 X_Y_Z_P_
M98 P_
G50
其中,G51中的X、Y、Z给出缩放中心的坐标值,P后跟缩放倍数。G51既可指定平面缩放,也可指定空间缩放。用G51指定缩放开,G50指定缩放关。在G51后,运动指令的坐标值以(X,Y,Z)为缩放中心,按P规定的缩放比例进行计算。使用G51指令可用一个程序加工出形状相同,尺寸不同的工件。G51、G50为模态指令,可相互注销,G50为缺省值。
注: 有刀补时,先缩放,然后进行刀具长度补偿、半径补偿。
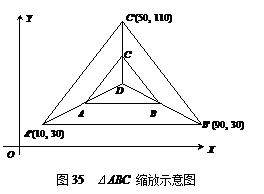
例如在图35所示的三角形ABC中,顶点为A(30, 40),B(70, 40),C(50, 80),若缩放中心为D(50, 50),则缩放程序为 G51 X50 Y50 P2
执行该程序,将自动计算A¢,B¢,C¢三点坐标数据为A¢(10,30),B¢(90,30),C¢ (50,110),从而获得放大一倍的△A¢B¢C¢。
 3、旋转变换G68,G69
3、旋转变换G68,G69
格式:G68 X__Y__R__
G69
其中,(X、Y)是由G17,G18或G19定义的旋转中心的坐标值,R为旋转角度,单位是(°),0≤R≤360.000°
G68为坐标旋转功能,G69为取消坐标旋转功能。
注: 在有刀具补偿的情况下,先进行坐标旋转,然后才进行刀具半径补偿、刀具长度补偿。在有缩放功能的情况下,先缩放后旋转。
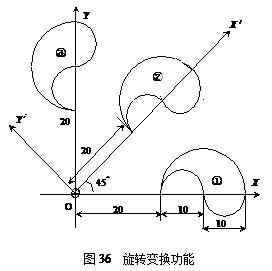
例. 如图36所示的旋转变换功能程序。
%1 主程序
N10 G90 G17 M03
N20 M98 P100 加工①
N30 G68 X0 Y0 P45 旋转45°
N40 M98 P100 加工②
N50 G69 取消旋转
N60 G68 X0 Y0 P90 旋转90°
N70 M98 P100 加工③
N80 G69 M05 取消旋转
N90 M30
|
%100子程序 (①的加工程序)
N100 G90 G41 G01 X20 Y0 F100
N110 G02 X30 Y0 I5
N120 G03 X40 Y0 I5
N130 X20 Y0 I-10
N140 G00 G40 X0 Y0
N150 M99
|
极坐标编程:
对于中心对称分布的零件,采用极坐标编程十分方便。
格式:G15或G16
G15——取消极坐标系指令
G16——建立极坐标系指令
说明:
(1)极坐标平面选择用G17、G18、G19指定。
(2)G17时,+X轴为极轴,程序中X指令极径,Y指令极角
G18时, +Z轴为极轴,程序中Z指令极径,X指令极角
G19时, +Y轴为极轴,程序中Y指令极径,Z指令极角
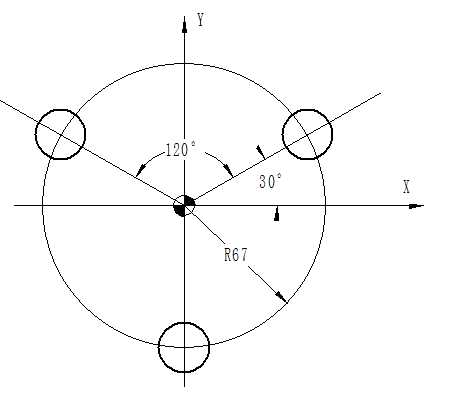
如图所示:钻孔循环,使用极坐标编程如下:
G17 G90 G16
(极坐标指令XY平面)
G81 X67 Y30 X-20 R5 F200
(极径67mm,极角300)
X67 Y150
X67 Y270 |
 |



